basic drivetrain controller, supports smoothed movements on each axis More...
#include <JDrivetrainControllerBasic.h>
Public Member Functions | |
| JDrivetrainControllerBasic (JDrivetrain &_drivetrain, JTwoDTransform _velLimit, JTwoDTransform _accelLimit, JTwoDTransform _distError, bool _velNotPosDelta=true) | |
| void | run () |
| run as frequently as possible | |
| void | moveVel (JTwoDTransform _vel, bool _run=false) |
| make drivetrain approach set velocity following acceleration limits | |
| boolean | isDrivetrainAtTarget () |
| are all the drivetrain distance Derivs_Limiters at their position targets? | |
| void | moveDist (JTwoDTransform _dist, bool _run=false) |
| make each axis of the drivetrain go to target position, following accel and vel limits | |
| void | moveDistY (float _y, bool _run=false) |
| void | moveDistTheta (float _theta, bool _run=false) |
| void | moveDistX (float _x, bool _run=false) |
| void | moveDistInc (JTwoDTransform _d, bool _run=false) |
| void | moveDistYInc (float _y, bool _run=false) |
| void | moveDistThetaInc (float _theta, bool _run=false) |
| void | moveDistXInc (float _x, bool _run=false) |
| bool | isVelZero () |
| bool | getDistMode () |
| true if going to distance target, false if velocity based | |
| bool | getIsControlled () |
| true=velocity and acceleration is limited, false=writing directly to drivetrain | |
| JTwoDTransform | getDistTarget () |
| void | setVelLimit (JTwoDTransform _velLim) |
| void | setAccelLimit (JTwoDTransform _accelLim) |
| JTwoDTransform | getVelLimit () |
| JTwoDTransform | getAccelLimit () |
| void | setVelLimitY (float l) |
| void | setVelLimitX (float l) |
| void | setVelLimitTheta (float l) |
| void | setAccelLimitY (float l) |
| void | setAccelLimitX (float l) |
| void | setAccelLimitTheta (float l) |
| void | setVelNotPosDelta (bool _velNotPosDelta) |
| true = uses setVel() when setting drivetrain velocity, false = uses setPosDelta() when setting drivetrain velocity | |
| void | setVel (JTwoDTransform _vel, bool _run=false) |
| sets drivetrain velocity immediately | |
| void | setDistSetpoint (JTwoDTransform _dist, bool _run=false) |
| void | setDistDelta (JTwoDTransform _dist, bool _run=false) |
| void | resetDist () |
| JTwoDTransform | getVel (bool _run=false) |
| JTwoDTransform | getDist (bool _run=false) |
| JTwoDTransform | getDistSetpoint () |
| returns what distances are being set as the setpoints for each axis of the drivetrain | |
| JTwoDTransform | getMaxVel () |
| returns the approximate maximum velocity of the drivetrain, if the drivetrain is told to move at max velocity, it should set the motors to full power. | |
| float | getMotorVel (unsigned char i) |
| void | setMotorVel (float vel, unsigned char i, bool _run=false) |
| void | setMotorDistSetpoint (float distSetpoint, unsigned char i, bool _run=false) |
| void | setMotorDistDelta (float distDelta, unsigned char i, bool _run=false) |
| unsigned char | getNumberMotors () |
| bool | setEnable (bool _enable) |
| enables or disables movement | |
| bool | enable () |
| enables movement | |
| bool | disable () |
| disables movement | |
| bool | getEnable () |
| gets the current state (enabled or disabled) | |
Public Attributes | |
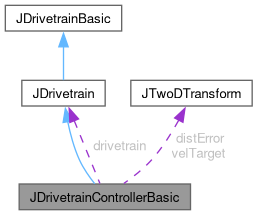
| JDrivetrain & | drivetrain |
| Derivs_Limiter | XLimiter |
| Derivs_Limiter | YLimiter |
| Derivs_Limiter | ThetaLimiter |
| JTwoDTransform | distError |
Protected Attributes | |
| bool | controlled |
| bool | distMode |
| unsigned long | lastCalcMillis |
| JTwoDTransform | velTarget |
| bool | velNotPosDelta |
Detailed Description
basic drivetrain controller, supports smoothed movements on each axis
- Note
- each axis is separate, this drivetrain controller doesn't combine movements over time to actually calculate its position
Constructor & Destructor Documentation
◆ JDrivetrainControllerBasic()
|
inline |
Member Function Documentation
◆ disable()
|
inlinevirtual |
◆ enable()
|
inlinevirtual |
◆ getAccelLimit()
|
inline |
◆ getDist()
|
inlinevirtual |
Reimplemented from JDrivetrain.
◆ getDistMode()
|
inline |
true if going to distance target, false if velocity based
- Return values
-
bool
◆ getDistSetpoint()
|
inline |
returns what distances are being set as the setpoints for each axis of the drivetrain
- Note
- only works in controlled dist mode
- Return values
-
(JTwoDTransform)
◆ getDistTarget()
|
inline |
◆ getEnable()
|
inlinevirtual |
gets the current state (enabled or disabled)
- Return values
-
(bool) true=enabled false=movement disabled
Implements JDrivetrainBasic.
◆ getIsControlled()
|
inline |
true=velocity and acceleration is limited, false=writing directly to drivetrain
- Return values
-
(bool)
◆ getMaxVel()
|
inlinevirtual |
returns the approximate maximum velocity of the drivetrain, if the drivetrain is told to move at max velocity, it should set the motors to full power.
- Note
- depends on how well calibrated the motor compensators are
- Return values
-
(JTwoDTransform) maximum velocity (in whatever units your drivetrain and motors are set up for)
Implements JDrivetrainBasic.
◆ getMotorVel()
|
inlinevirtual |
Reimplemented from JDrivetrain.
◆ getNumberMotors()
|
inlinevirtual |
Reimplemented from JDrivetrain.
◆ getVel()
|
inlinevirtual |
Reimplemented from JDrivetrain.
◆ getVelLimit()
|
inline |
◆ isDrivetrainAtTarget()
|
inline |
are all the drivetrain distance Derivs_Limiters at their position targets?
- Note
- doesn't check whether in position control mode
- Return values
-
boolean
◆ isVelZero()
|
inline |
◆ moveDist()
|
inline |
make each axis of the drivetrain go to target position, following accel and vel limits
- Note
- each axis is controlled separately, you are not setting absolute position, just target distance for each axis
- Parameters
-
_dist (JTwoDTransform) target distance _run (bool) default=false, true=run gets called within this function, false=call run yourself outside this function
◆ moveDistInc()
|
inline |
◆ moveDistTheta()
|
inline |
◆ moveDistThetaInc()
|
inline |
◆ moveDistX()
|
inline |
◆ moveDistXInc()
|
inline |
◆ moveDistY()
|
inline |
◆ moveDistYInc()
|
inline |
◆ moveVel()
|
inline |
make drivetrain approach set velocity following acceleration limits
- Parameters
-
_vel (JTwoDTransform) target velocity _run (bool) default=false, true=run gets called within this function, false=call run yourself outside this function
◆ resetDist()
|
inlinevirtual |
Reimplemented from JDrivetrain.
◆ run()
|
inlinevirtual |
run as frequently as possible
Implements JDrivetrainBasic.
◆ setAccelLimit()
|
inline |
◆ setAccelLimitTheta()
|
inline |
◆ setAccelLimitX()
|
inline |
◆ setAccelLimitY()
|
inline |
◆ setDistDelta()
|
inlinevirtual |
Reimplemented from JDrivetrain.
◆ setDistSetpoint()
|
inlinevirtual |
Reimplemented from JDrivetrain.
◆ setEnable()
|
inlinevirtual |
enables or disables movement
- Parameters
-
_enable (bool) true=enabled false=movement disabled
- Return values
-
did the state change
Implements JDrivetrainBasic.
◆ setMotorDistDelta()
|
inlinevirtual |
Reimplemented from JDrivetrain.
◆ setMotorDistSetpoint()
|
inlinevirtual |
Reimplemented from JDrivetrain.
◆ setMotorVel()
|
inlinevirtual |
Reimplemented from JDrivetrain.
◆ setVel()
|
inlinevirtual |
sets drivetrain velocity immediately
- Parameters
-
_vel JTwoDTransform of velocity wanted for drivetrain _run (bool) default=false, true=run gets called within this function, false=call run yourself outside this function
- Return values
-
None
Implements JDrivetrainBasic.
◆ setVelLimit()
|
inline |
◆ setVelLimitTheta()
|
inline |
◆ setVelLimitX()
|
inline |
◆ setVelLimitY()
|
inline |
◆ setVelNotPosDelta()
|
inline |
true = uses setVel() when setting drivetrain velocity, false = uses setPosDelta() when setting drivetrain velocity
- Parameters
-
_velNotPosDelta (bool)
Member Data Documentation
◆ controlled
|
protected |
◆ distError
| JTwoDTransform JDrivetrainControllerBasic::distError |
◆ distMode
|
protected |
◆ drivetrain
| JDrivetrain& JDrivetrainControllerBasic::drivetrain |
◆ lastCalcMillis
|
protected |
◆ ThetaLimiter
| Derivs_Limiter JDrivetrainControllerBasic::ThetaLimiter |
◆ velNotPosDelta
|
protected |
◆ velTarget
|
protected |
◆ XLimiter
| Derivs_Limiter JDrivetrainControllerBasic::XLimiter |
◆ YLimiter
| Derivs_Limiter JDrivetrainControllerBasic::YLimiter |
The documentation for this class was generated from the following file:
- src/JDrivetrainController/JDrivetrainControllerBasic.h