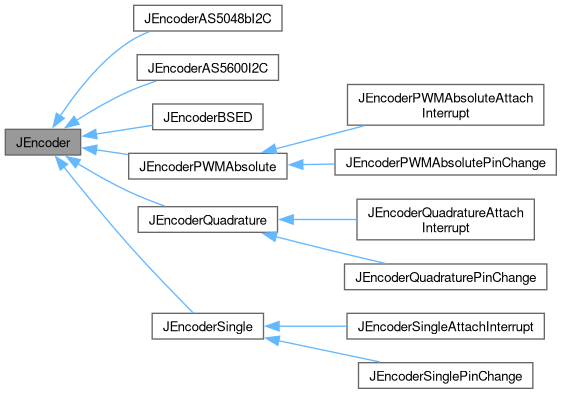
defines common interface for JEncoder More...
#include <JEncoder.h>
Public Member Functions | |
| virtual void | setRev (bool _rev) |
| empty function for directionless encoders to override | |
| virtual long | zeroCounter () |
| reset the counter of how far the encoder has turned | |
| virtual float | getVel () |
| calculates velocity in distance per second where distance was set by setdistPerCountFactor() | |
| virtual long | getCounter () |
| returns how far the encoder has turned from the zero position | |
| virtual float | getPos () |
| returns how far the encoder has turned from the zero position converted to distance | |
| virtual float | getDistPerCountFactor () |
| returns a conversion factor between encoder ticks and distance that can be set for the encoder | |
| virtual void | setDistPerCountFactor (float _factor) |
| set the conversion factor between encoder ticks and distance | |
| virtual bool | hasDirection () |
| can this encoder measure direction or just speed | |
| virtual bool | isVelNew () |
| could be useful for only recalculating a control loop if there's new velocity data | |
| virtual void | run () |
| if an encoder needs to have some code called each loop (like absolute encoder polling encoder and calculating amount turned) | |
Detailed Description
defines common interface for JEncoder
- Note
- JEcoder's functions are virtual, it can not be used directly
Member Function Documentation
◆ getCounter()
|
virtual |
returns how far the encoder has turned from the zero position
- Note
- remember that variables overflow
- Return values
-
(long) encoder ticks
Reimplemented in JEncoderAS5048bI2C, JEncoderAS5600I2C, JEncoderBSED, JEncoderPWMAbsolute, JEncoderQuadrature, and JEncoderSingle.
◆ getDistPerCountFactor()
|
virtual |
returns a conversion factor between encoder ticks and distance that can be set for the encoder
- Note
- default is 1.0
- Return values
-
(float) distPerCountFactor
Reimplemented in JEncoderAS5048bI2C, JEncoderAS5600I2C, JEncoderBSED, JEncoderPWMAbsolute, JEncoderQuadrature, and JEncoderSingle.
◆ getPos()
|
virtual |
returns how far the encoder has turned from the zero position converted to distance
- Note
- remember that variables overflow (counter) and that floats have limited precision
- Return values
-
(float) encoder ticks converted to distance
Reimplemented in JEncoderAS5048bI2C, JEncoderAS5600I2C, JEncoderBSED, JEncoderPWMAbsolute, JEncoderQuadrature, and JEncoderSingle.
◆ getVel()
|
virtual |
calculates velocity in distance per second where distance was set by setdistPerCountFactor()
- Return values
-
(float) velocity
Reimplemented in JEncoderAS5048bI2C, JEncoderAS5600I2C, JEncoderBSED, JEncoderPWMAbsolute, JEncoderQuadrature, and JEncoderSingle.
◆ hasDirection()
|
virtual |
can this encoder measure direction or just speed
- Return values
-
(bool) true = can measure direction
Reimplemented in JEncoderAS5048bI2C, JEncoderAS5600I2C, JEncoderBSED, JEncoderPWMAbsolute, JEncoderQuadrature, and JEncoderSingle.
◆ isVelNew()
|
virtual |
could be useful for only recalculating a control loop if there's new velocity data
- Return values
-
(bool) true if velocity has changed since this function was last called
Reimplemented in JEncoderAS5048bI2C, JEncoderAS5600I2C, JEncoderBSED, JEncoderPWMAbsolute, JEncoderQuadrature, and JEncoderSingle.
◆ run()
|
virtual |
if an encoder needs to have some code called each loop (like absolute encoder polling encoder and calculating amount turned)
- Note
- interrupt based encoders don't need this to do anything and can define an empty function
Reimplemented in JEncoderAS5048bI2C, JEncoderAS5600I2C, JEncoderBSED, JEncoderPWMAbsolute, JEncoderQuadrature, and JEncoderSingle.
◆ setDistPerCountFactor()
|
virtual |
set the conversion factor between encoder ticks and distance
- Parameters
-
_factor (float)
Reimplemented in JEncoderAS5048bI2C, JEncoderAS5600I2C, JEncoderBSED, JEncoderPWMAbsolute, JEncoderQuadrature, and JEncoderSingle.
◆ setRev()
|
inlinevirtual |
empty function for directionless encoders to override
Reimplemented in JEncoderSingle.
◆ zeroCounter()
|
virtual |
reset the counter of how far the encoder has turned
- Return values
-
(long) returns value of counter before it is reset
Reimplemented in JEncoderAS5048bI2C, JEncoderAS5600I2C, JEncoderBSED, JEncoderPWMAbsolute, JEncoderQuadrature, and JEncoderSingle.
The documentation for this class was generated from the following file:
- src/JEncoder/JEncoder.h