interface for a drivetrain that makes it into field oriented More...
#include <JDrivetrainFieldOriented.h>
Public Member Functions | |
| JDrivetrainFieldOriented (JDrivetrain &_drivetrain) | |
| float | getHeading () |
| void | giveHeading (float _heading) |
| void | run () |
| call this in loop. it calls any encoder or motor update functions | |
| bool | setEnable (bool _enable) |
| enables or disables movement | |
| bool | enable () |
| enables movement | |
| bool | disable () |
| disables movement | |
| bool | getEnable () |
| gets the current state (enabled or disabled) | |
| void | setVel (JTwoDTransform _vel, bool _run=false) |
| sets a velocity for the drivetrain to move at | |
| JTwoDTransform | getMaxVel () |
| returns the approximate maximum velocity of the drivetrain, if the drivetrain is told to move at max velocity, it should set the motors to full power. | |
| JTwoDTransform | getVel (bool _run=false) |
| JTwoDTransform | getDist (bool _run=false) |
| void | setDistSetpoint (JTwoDTransform _dist, bool _run=false) |
| void | setDistDelta (JTwoDTransform _dist, bool _run=false) |
| void | resetDist () |
| void | setMotorVel (float vel, unsigned char i, bool _run=false) |
| float | getMotorVel (unsigned char i) |
| void | setMotorDistSetpoint (float distSetpoint, unsigned char i, bool _run=false) |
| void | setMotorDistDelta (float distDelta, unsigned char i, bool _run=false) |
| unsigned char | getNumberMotors () |
Protected Attributes | |
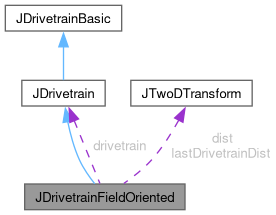
| JDrivetrain & | drivetrain |
| float | imuHeading = 0 |
| float | imuHeadingOffset = 0 |
| float | lastImuHeading = 0 |
| float | theta = 0 |
| int | fullRotations = 0 |
| JTwoDTransform | dist = { 0, 0, 0 } |
| JTwoDTransform | lastDrivetrainDist = { 0, 0, 0 } |
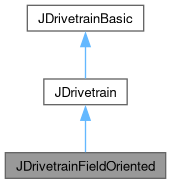
Detailed Description
interface for a drivetrain that makes it into field oriented
/ TODO: NOT DONE YET* //TODO: COMMENT
- Note
- only makes sense for drivetrains that can move in any direction
Constructor & Destructor Documentation
◆ JDrivetrainFieldOriented()
|
inline |
Member Function Documentation
◆ disable()
|
inlinevirtual |
◆ enable()
|
inlinevirtual |
◆ getDist()
|
inlinevirtual |
Reimplemented from JDrivetrain.
◆ getEnable()
|
inlinevirtual |
gets the current state (enabled or disabled)
- Return values
-
(bool) true=enabled false=movement disabled
Implements JDrivetrainBasic.
◆ getHeading()
|
inline |
◆ getMaxVel()
|
inlinevirtual |
returns the approximate maximum velocity of the drivetrain, if the drivetrain is told to move at max velocity, it should set the motors to full power.
- Note
- depends on how well calibrated the motor compensators are
- Return values
-
(JTwoDTransform) maximum velocity (in whatever units your drivetrain and motors are set up for)
Implements JDrivetrainBasic.
◆ getMotorVel()
|
inlinevirtual |
Reimplemented from JDrivetrain.
◆ getNumberMotors()
|
inlinevirtual |
Reimplemented from JDrivetrain.
◆ getVel()
|
inlinevirtual |
Reimplemented from JDrivetrain.
◆ giveHeading()
|
inline |
◆ resetDist()
|
inlinevirtual |
Reimplemented from JDrivetrain.
◆ run()
|
inlinevirtual |
call this in loop. it calls any encoder or motor update functions
Implements JDrivetrainBasic.
◆ setDistDelta()
|
inlinevirtual |
Reimplemented from JDrivetrain.
◆ setDistSetpoint()
|
inlinevirtual |
- Note
- don't set a dist setpoint far from the current distance
- Parameters
-
_dist _run
- Return values
-
None
Reimplemented from JDrivetrain.
◆ setEnable()
|
inlinevirtual |
enables or disables movement
- Parameters
-
_enable (bool) true=enabled false=movement disabled
- Return values
-
did the state change
Implements JDrivetrainBasic.
◆ setMotorDistDelta()
|
inlinevirtual |
Reimplemented from JDrivetrain.
◆ setMotorDistSetpoint()
|
inlinevirtual |
Reimplemented from JDrivetrain.
◆ setMotorVel()
|
inlinevirtual |
Reimplemented from JDrivetrain.
◆ setVel()
|
inlinevirtual |
sets a velocity for the drivetrain to move at
- Parameters
-
_vel (JTwoDTransform) velocity to move at _run (bool, default=true) if true setVel will call run() for you, if false you must call it yourself
- Return values
-
None
Implements JDrivetrainBasic.
Member Data Documentation
◆ dist
|
protected |
◆ drivetrain
|
protected |
◆ fullRotations
|
protected |
◆ imuHeading
|
protected |
◆ imuHeadingOffset
|
protected |
◆ lastDrivetrainDist
|
protected |
◆ lastImuHeading
|
protected |
◆ theta
|
protected |
The documentation for this class was generated from the following file:
- src/JDrivetrain/JDrivetrainFieldOriented.h