#include <JMotorDriverAvrHBridge.h>
|
| | JMotorDriverAvrHBridge (byte _pinPos, byte _pinNeg, bool _reverse=false) |
| |
| bool | set (float val) |
| | set motor power
|
| |
| bool | setEnable (bool _enable) |
| | use to enable or disable a motor, and sets up pin states
|
| |
| bool | getEnable () |
| | get the enable state of the driver
|
| |
| float | getMaxRange () |
| | high end of the range
|
| |
| float | getMinRange () |
| | low end of the range
|
| |
| bool | enable () |
| | enable motor
|
| |
| bool | disable () |
| | disable motor
|
| |
◆ JMotorDriverAvrHBridge()
| JMotorDriverAvrHBridge::JMotorDriverAvrHBridge |
( |
byte |
_pinPos, |
|
|
byte |
_pinNeg, |
|
|
bool |
_reverse = false |
|
) |
| |
|
inline |
◆ getEnable()
| bool JMotorDriverAvrHBridge::getEnable |
( |
| ) |
|
|
inlinevirtual |
get the enable state of the driver
- Return values
-
| (bool) | true if enabled, false if disabled |
Reimplemented from JMotorDriver.
◆ getMaxRange()
| float JMotorDriverAvrHBridge::getMaxRange |
( |
| ) |
|
|
inlinevirtual |
high end of the range
- Note
- usually 1.0
- Return values
-
Reimplemented from JMotorDriver.
◆ getMinRange()
| float JMotorDriverAvrHBridge::getMinRange |
( |
| ) |
|
|
inlinevirtual |
low end of the range
- Note
- usually -1.0, if 0, that indicates a motor controller with no reverse function
- Return values
-
Reimplemented from JMotorDriver.
◆ set()
| bool JMotorDriverAvrHBridge::set |
( |
float |
val | ) |
|
|
inlinevirtual |
set motor power
- Note
- val should be between getMinRange and getMaxRange, but constrained internally
- Parameters
-
- Return values
-
| (bool) | false if at end of power range, true otherwise |
Reimplemented from JMotorDriver.
◆ setEnable()
| bool JMotorDriverAvrHBridge::setEnable |
( |
bool |
_enable | ) |
|
|
inlinevirtual |
use to enable or disable a motor, and sets up pin states
- Note
- setEnable(true) must be called before a motor driver will activate
- Parameters
-
| _enable | (bool) true=enable, false=disable |
- Return values
-
| (bool) | true if state changed, false if state already set |
Reimplemented from JMotorDriver.
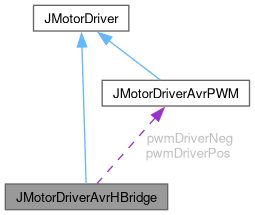
◆ pwmDriverNeg
◆ pwmDriverPos
◆ reverse
| bool JMotorDriverAvrHBridge::reverse |
The documentation for this class was generated from the following file:
 Public Member Functions inherited from JMotorDriver
Public Member Functions inherited from JMotorDriver