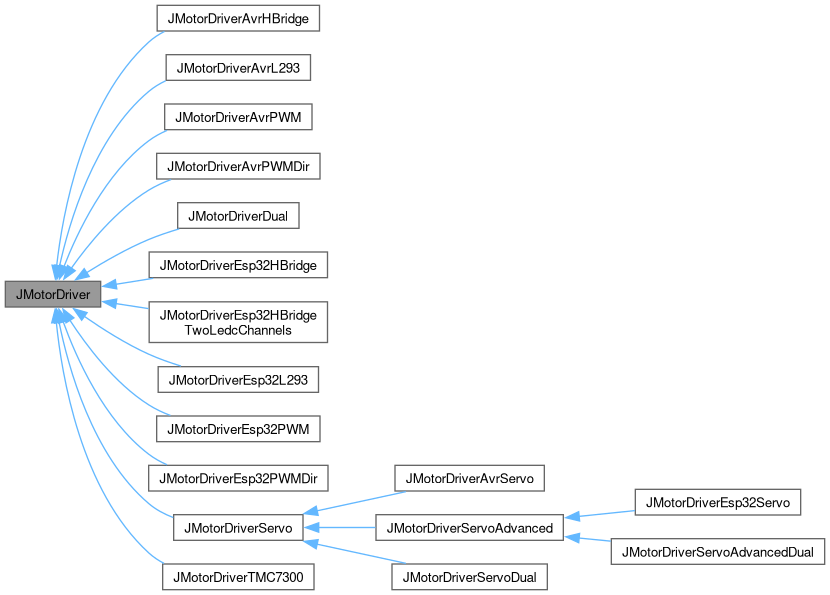
defines common interface for all types of JMotorDrivers More...
#include <JMotorDriver.h>
Public Member Functions | |
| virtual bool | set (float val) |
| set motor power | |
| virtual bool | setEnable (bool _enable) |
| use to enable or disable a motor, and sets up pin states | |
| virtual bool | getEnable () |
| get the enable state of the driver | |
| virtual float | getMaxRange () |
| high end of the range | |
| virtual float | getMinRange () |
| low end of the range | |
| bool | enable () |
| enable motor | |
| bool | disable () |
| disable motor | |
Detailed Description
defines common interface for all types of JMotorDrivers
- Note
- JMotorDriver's functions are virtual, it can not be used directly
Member Function Documentation
◆ disable()
|
inline |
disable motor
- Note
- equivalent to setEnable(false)
- Return values
-
(bool) true if state changed, false if state already set
◆ enable()
|
inline |
enable motor
- Note
- equivalent to setEnable(true)
- Return values
-
(bool) true if state changed, false if state already set
◆ getEnable()
|
virtual |
get the enable state of the driver
- Return values
-
(bool) true if enabled, false if disabled
Reimplemented in JMotorDriverAvrHBridge, JMotorDriverAvrL293, JMotorDriverAvrPWM, JMotorDriverAvrPWMDir, JMotorDriverAvrServo, JMotorDriverDual, JMotorDriverEsp32HBridge, JMotorDriverEsp32HBridgeTwoLedcChannels, JMotorDriverEsp32L293, JMotorDriverEsp32PWM, JMotorDriverEsp32PWMDir, JMotorDriverEsp32Servo, JMotorDriverPCA9685HBridge, JMotorDriverServoAdvancedDual, JMotorDriverServoDual, and JMotorDriverTMC7300.
◆ getMaxRange()
|
virtual |
high end of the range
- Note
- usually 1.0
- Return values
-
(float) maxRange
Reimplemented in JMotorDriverAvrHBridge, JMotorDriverAvrL293, JMotorDriverAvrPWM, JMotorDriverAvrPWMDir, JMotorDriverAvrServo, JMotorDriverDual, JMotorDriverEsp32HBridge, JMotorDriverEsp32HBridgeTwoLedcChannels, JMotorDriverEsp32L293, JMotorDriverEsp32PWM, JMotorDriverEsp32PWMDir, JMotorDriverEsp32Servo, JMotorDriverPCA9685HBridge, JMotorDriverServoAdvancedDual, JMotorDriverServoDual, and JMotorDriverTMC7300.
◆ getMinRange()
|
virtual |
low end of the range
- Note
- usually -1.0, if 0, that indicates a motor controller with no reverse function
- Return values
-
(float) minRange
Reimplemented in JMotorDriverAvrHBridge, JMotorDriverAvrL293, JMotorDriverAvrPWM, JMotorDriverAvrPWMDir, JMotorDriverAvrServo, JMotorDriverDual, JMotorDriverEsp32HBridge, JMotorDriverEsp32HBridgeTwoLedcChannels, JMotorDriverEsp32L293, JMotorDriverEsp32PWM, JMotorDriverEsp32PWMDir, JMotorDriverEsp32Servo, JMotorDriverPCA9685HBridge, JMotorDriverServoAdvancedDual, JMotorDriverServoDual, and JMotorDriverTMC7300.
◆ set()
|
virtual |
set motor power
- Note
- val should be between getMinRange and getMaxRange, but constrained internally
- Parameters
-
val (float) val
- Return values
-
(bool) false if at end of power range, true otherwise
Reimplemented in JMotorDriverAvrPWM, JMotorDriverAvrServo, JMotorDriverEsp32PWM, JMotorDriverEsp32Servo, JMotorDriverAvrHBridge, JMotorDriverAvrL293, JMotorDriverAvrPWMDir, JMotorDriverDual, JMotorDriverEsp32HBridge, JMotorDriverEsp32HBridgeTwoLedcChannels, JMotorDriverEsp32L293, JMotorDriverEsp32PWMDir, JMotorDriverPCA9685HBridge, JMotorDriverServoAdvancedDual, JMotorDriverServoDual, and JMotorDriverTMC7300.
◆ setEnable()
|
virtual |
use to enable or disable a motor, and sets up pin states
- Note
- setEnable(true) must be called before a motor driver will activate
- Parameters
-
_enable (bool) true=enable, false=disable
- Return values
-
(bool) true if state changed, false if state already set
Reimplemented in JMotorDriverAvrHBridge, JMotorDriverAvrL293, JMotorDriverAvrPWM, JMotorDriverAvrPWMDir, JMotorDriverAvrServo, JMotorDriverDual, JMotorDriverEsp32HBridge, JMotorDriverEsp32HBridgeTwoLedcChannels, JMotorDriverEsp32L293, JMotorDriverEsp32PWM, JMotorDriverEsp32PWMDir, JMotorDriverEsp32Servo, JMotorDriverPCA9685HBridge, JMotorDriverServoAdvancedDual, JMotorDriverServoDual, and JMotorDriverTMC7300.
The documentation for this class was generated from the following file:
- src/JMotorDriver/JMotorDriver.h