This class controls velocity and position of a motor without any encoder feedback. More...
#include <JMotorControllerOpen.h>
Public Member Functions | |
| JMotorControllerOpen (JMotorDriver &_driver, JMotorCompensator &_compensator, float _velLimit=INFINITY, float _accelLimit=INFINITY, unsigned long _minMotorPulseTime=0) | |
| Constructor for an object that controls a motor, and can smooth the motion of the motor and go approximately to a position. | |
| void | run () |
| update driver | |
| bool | setEnable (bool _enable) |
| change whether motor controller is enabled | |
| bool | setPosTarget (float _posTarget, bool _run=true) |
| set target position (motor drives towards position, following acceleration profile) | |
| bool | setPosSetpoint (float _posSetpoint, bool _run=true) |
| set position for motor to drive towards position as fast as possible (setpoint for control loop if available) | |
| bool | setPosDelta (float _posDelta, bool _run=true, bool _resetPos=false) |
| alternative method for setting velocity that uses setPosSetpoint | |
| float | getPosTarget () |
| get position set as target (for smoothed position setting mode) | |
| float | getPosSetpoint () |
| get position controller is currently trying to get to | |
| float | getPos () |
| get what position the motor is currently at | |
| float | resetPos () |
| reset what position the controller thinks it's in | |
| bool | isPosModeNotVelocity () |
| true if controller is in position target mode, false if in velocity mode | |
| void | setVel (float vel, bool _run=true) |
| set velocity for controller | |
| void | setVelTarget (float vel, bool _run=true) |
| set target velocity for controller (acceleration limited) | |
| void | setVelLimit (float _velLimit) |
| set maximum motor speed | |
| void | setAccelLimit (float _accelLimit) |
| set maximum rate that motor speed can be changed at | |
| void | setVelAccelLimits (float _vel, float _accel) |
| set velocity and acceleration limits for motor | |
| void | setMinMotorPulseTime (unsigned long _minMotorPulseTime) |
| At low speeds in setPosDelta the motor cycles between min speed and stopped. What is the minimum pulse that makes the motor move, in MICROseconds? | |
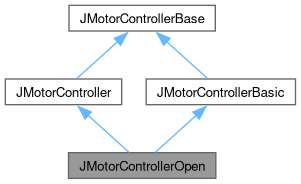
 Public Member Functions inherited from JMotorControllerBasic Public Member Functions inherited from JMotorControllerBasic | |
| JMotorControllerBasic (JMotorDriver &_driver, JMotorCompensator &_compensator, float _velLimit=INFINITY, float _accelLimit=INFINITY) | |
| constructor | |
| float | getVelTarget () |
| get target velocity for controller | |
| float | getVel () |
| get current velocity of motor | |
| float | getDriverSetVal () |
| returns the value the motor driver is being set to | |
| bool | isDriverInRange () |
| true if motor driver is being set to within its range, false if driver is at a maximum | |
| bool | enable () |
| enable motor controller | |
| bool | disable () |
| disable motor controller | |
| float | getDriverMinRange () |
| if getDriverSetVal goes below this, isDriverInRange will go false | |
| float | getDriverMaxRange () |
| if getDriverSetVal exceeds this, isDriverInRange will go false | |
| bool | getEnable () |
| is the controller enabled | |
| float | getMaxVel () |
| How fast of a motor speed setting would get adjusted to full motor power. | |
| float | getMinVel () |
| slowest speed motor can go | |
| void | setMaxDriverRangeAmount (float _driverRangeAmount) |
| set what fraction of driverRange can be used | |
| float | getVelLimit () |
| returns value of velLimit | |
| float | getAccelLimit () |
| returns value of accelLimit | |
Public Attributes | |
| Derivs_Limiter | dL |
| use functions from JMotorControllerOpen whenever possible, but the Derivs_Limiter object is public in case you need to change a setting like dL.setPreventGoingWrongWay() | |
Protected Attributes | |
| bool | posMode |
| bool | smoothedMode |
| float | position |
| float | positionTarget |
| float | posDelta |
| unsigned long | lastRunOpenMicros |
| unsigned long | minMotorPulseTime |
| unsigned long | lastPosDeltaWrite |
| Protected Attributes inherited from JMotorControllerBasic | |
| float | velocity |
| float | setVal |
| float | velocityTarget |
| float | accelLimit |
| float | velLimit |
| unsigned long | lastRunMicros |
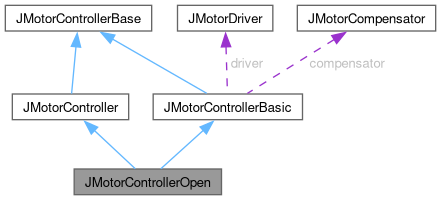
| JMotorDriver & | driver |
| bool | driverInRange |
| JMotorCompensator & | compensator |
Detailed Description
This class controls velocity and position of a motor without any encoder feedback.
Constructor & Destructor Documentation
◆ JMotorControllerOpen()
|
inline |
Constructor for an object that controls a motor, and can smooth the motion of the motor and go approximately to a position.
- Parameters
-
_driver reference to a JMotorDriver _compensator reference to a JMotorCompensator _velLimit float, default INFINITY _accelLimit float, default INFINITY _minMotorPulseTime unsigned long, default 0. At low speeds in setPosDelta the motor cycles between min speed and stopped. What is the minimum pulse that makes the motor move, in MICROseconds?
Member Function Documentation
◆ getPos()
|
inlinevirtual |
◆ getPosSetpoint()
|
inlinevirtual |
get position controller is currently trying to get to
- Return values
-
(float)
Implements JMotorController.
◆ getPosTarget()
|
inlinevirtual |
get position set as target (for smoothed position setting mode)
- Return values
-
(float)
Implements JMotorController.
◆ isPosModeNotVelocity()
|
inlinevirtual |
true if controller is in position target mode, false if in velocity mode
- Return values
-
(bool)
Implements JMotorController.
◆ resetPos()
|
inlinevirtual |
reset what position the controller thinks it's in
- Note
- don't drive too far without resetting this so that the limited precision of floats doesn't become a problem.
- Return values
-
(float) returns old position
Implements JMotorController.
◆ run()
|
inlinevirtual |
◆ setAccelLimit()
|
inlinevirtual |
set maximum rate that motor speed can be changed at
- Note
- set to INFINITY to disable acceleration limiting
- Parameters
-
_accelLimit (float)
Implements JMotorControllerBase.
◆ setEnable()
|
inlinevirtual |
change whether motor controller is enabled
- Parameters
-
_enable (bool)
- Note
- velocity related variables are reset to zero on disable. you can set velocity then enable
- Return values
-
(bool) true if state changed
Implements JMotorControllerBase.
◆ setMinMotorPulseTime()
|
inline |
At low speeds in setPosDelta the motor cycles between min speed and stopped. What is the minimum pulse that makes the motor move, in MICROseconds?
- Parameters
-
_minMotorPulseTime unsigned long
◆ setPosDelta()
|
inlinevirtual |
alternative method for setting velocity that uses setPosSetpoint
- Note
- handles velocities below getMinVel(), and may have better distance accuracy, doesn't smooth velocity
- Parameters
-
_posDelta (float) basically velocity _resetPos (bool) default=false, keep setting current position to zero _run (bool) default:true, true = call run() in this function, false = you'll call run() yourself
- Return values
-
(bool) did the setting change?
Implements JMotorController.
◆ setPosSetpoint()
|
inlinevirtual |
set position for motor to drive towards position as fast as possible (setpoint for control loop if available)
- Note
- run() needs to be called in order for the motor to move
- Parameters
-
_posSetpoint (float) position setpoint _run (bool) default:true, true = call run() in this function, false = you'll call run() yourself
- Return values
-
(bool) did the setpoint change?
Implements JMotorController.
◆ setPosTarget()
|
inlinevirtual |
set target position (motor drives towards position, following acceleration profile)
- Parameters
-
_posTarget (float) target position _run (bool) default:true, true = call run() in this function, false = you'll call run() yourself
- Return values
-
(bool) did the target change?
Implements JMotorController.
◆ setVel()
|
inlinevirtual |
set velocity for controller
- Note
- this function can be called repeatedly, or just once if run() is called frequently
- Parameters
-
vel (float) _run (bool) default:true, true = call run() in this function, false = you'll call run() yourself
Implements JMotorControllerBase.
◆ setVelAccelLimits()
|
inline |
set velocity and acceleration limits for motor
- Parameters
-
_vel _accel
- Return values
-
None
◆ setVelLimit()
|
inlinevirtual |
set maximum motor speed
- Note
- set to INFINITY to disable limit
- Parameters
-
_velLimit (float)
Implements JMotorController.
◆ setVelTarget()
|
inlinevirtual |
set target velocity for controller (acceleration limited)
- Note
- this function can be called repeatedly, or just once if run() is called frequently
- Parameters
-
vel (float) target velocity _run (bool) default:true, true = call run() in this function, false = you'll call run() yourself
Implements JMotorControllerBase.
Member Data Documentation
◆ dL
| Derivs_Limiter JMotorControllerOpen::dL |
use functions from JMotorControllerOpen whenever possible, but the Derivs_Limiter object is public in case you need to change a setting like dL.setPreventGoingWrongWay()
◆ lastPosDeltaWrite
|
protected |
◆ lastRunOpenMicros
|
protected |
◆ minMotorPulseTime
|
protected |
◆ posDelta
|
protected |
◆ position
|
protected |
◆ positionTarget
|
protected |
◆ posMode
|
protected |
◆ smoothedMode
|
protected |
The documentation for this class was generated from the following file:
- src/JMotorController/JMotorControllerOpen.h