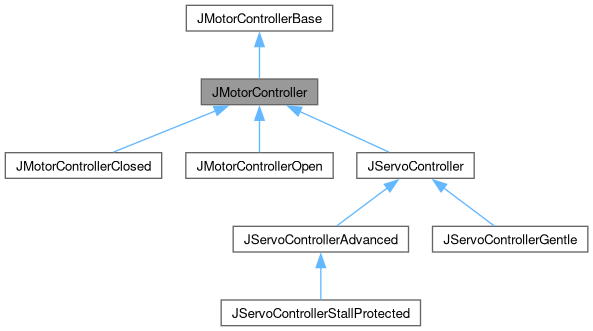
This class defines a common interface for classes which control velocity and position of a motor controlled by a JMotorDriver. More...
#include <JMotorController.h>
Public Member Functions | |
| virtual bool | setPosTarget (float _posTarget, bool _run=true)=0 |
| set target position (motor drives towards position, following acceleration profile) | |
| virtual bool | setPosSetpoint (float _posSetpoint, bool _run=true)=0 |
| set position for motor to drive towards position as fast as possible (setpoint for control loop if available) | |
| virtual bool | setPosDelta (float _posDelta, bool _run=true, bool _resetPos=false)=0 |
| alternative method for setting velocity that uses setPosSetpoint | |
| virtual float | getPosTarget ()=0 |
| get position set as target (for smoothed position setting mode) | |
| virtual float | getPosSetpoint ()=0 |
| get position controller is currently trying to get to | |
| virtual float | getPos ()=0 |
| get what position the motor is currently at | |
| virtual float | resetPos ()=0 |
| reset what position the controller thinks it's in | |
| virtual void | setVelLimit (float _velLimit)=0 |
| set maximum motor speed | |
| virtual bool | isPosModeNotVelocity ()=0 |
| true if controller is in position target mode, false if in velocity mode | |
 Public Member Functions inherited from JMotorControllerBase Public Member Functions inherited from JMotorControllerBase | |
| virtual void | setAccelLimit (float _accelLimit)=0 |
| set maximum rate that motor speed can be changed at | |
| virtual void | setVel (float vel, bool _run=true)=0 |
| set velocity for controller | |
| virtual void | setVelTarget (float vel, bool _run=true)=0 |
| set target velocity for controller (acceleration limited) | |
| virtual float | getVelTarget ()=0 |
| get target velocity for controller | |
| virtual float | getVel ()=0 |
| get current velocity of motor | |
| virtual float | getDriverSetVal ()=0 |
| returns the value the motor driver is being set to | |
| virtual void | run ()=0 |
| update driver | |
| virtual bool | setEnable (bool _enable)=0 |
| change whether motor controller is enabled | |
| virtual bool | isDriverInRange ()=0 |
| true if motor driver is being set to within its range, false if driver is at a maximum | |
| virtual bool | enable ()=0 |
| enable motor controller | |
| virtual bool | disable ()=0 |
| disable motor controller | |
| virtual float | getDriverMinRange ()=0 |
| if getDriverSetVal goes below this, isDriverInRange will go false | |
| virtual float | getDriverMaxRange ()=0 |
| if getDriverSetVal exceeds this, isDriverInRange will go false | |
| virtual bool | getEnable ()=0 |
| is the controller enabled | |
| virtual float | getMaxVel ()=0 |
| How fast of a motor speed setting would get adjusted to full motor power. | |
| virtual float | getMinVel ()=0 |
| slowest speed motor can go | |
| virtual void | setMaxDriverRangeAmount (float _driverRangeAmount)=0 |
| set what fraction of driverRange can be used | |
| virtual float | getAccelLimit ()=0 |
| returns value of accelLimit | |
| virtual float | getVelLimit ()=0 |
| returns value of velLimit | |
Detailed Description
This class defines a common interface for classes which control velocity and position of a motor controlled by a JMotorDriver.
Member Function Documentation
◆ getPos()
|
pure virtual |
get what position the motor is currently at
- Return values
-
(float)
Implemented in JMotorControllerClosed, JMotorControllerOpen, and JServoController.
◆ getPosSetpoint()
|
pure virtual |
get position controller is currently trying to get to
- Return values
-
(float)
Implemented in JMotorControllerClosed, JMotorControllerOpen, and JServoController.
◆ getPosTarget()
|
pure virtual |
get position set as target (for smoothed position setting mode)
- Return values
-
(float)
Implemented in JMotorControllerClosed, JMotorControllerOpen, and JServoController.
◆ isPosModeNotVelocity()
|
pure virtual |
true if controller is in position target mode, false if in velocity mode
- Return values
-
(bool)
Implemented in JMotorControllerClosed, JMotorControllerOpen, and JServoController.
◆ resetPos()
|
pure virtual |
reset what position the controller thinks it's in
- Note
- don't drive too far without resetting this so that the limited precision of floats doesn't become a problem.
- Return values
-
(float) returns old position
Implemented in JMotorControllerClosed, JMotorControllerOpen, and JServoController.
◆ setPosDelta()
|
pure virtual |
alternative method for setting velocity that uses setPosSetpoint
- Note
- handles velocities below getMinVel(), and may have better distance accuracy, doesn't smooth velocity
- Parameters
-
_posDelta (float) basically velocity _resetPos (bool) default=false, keep setting current position to zero _run (bool) default:true, true = call run() in this function, false = you'll call run() yourself
- Return values
-
(bool) did the setting change?
Implemented in JMotorControllerClosed, JMotorControllerOpen, and JServoController.
◆ setPosSetpoint()
|
pure virtual |
set position for motor to drive towards position as fast as possible (setpoint for control loop if available)
- Note
- run() needs to be called in order for the motor to move
- Parameters
-
_posSetpoint (float) position setpoint _run (bool) default:true, true = call run() in this function, false = you'll call run() yourself
- Return values
-
(bool) did the setpoint change?
Implemented in JMotorControllerClosed, JMotorControllerOpen, and JServoController.
◆ setPosTarget()
|
pure virtual |
set target position (motor drives towards position, following acceleration profile)
- Parameters
-
_posTarget (float) target position _run (bool) default:true, true = call run() in this function, false = you'll call run() yourself
- Return values
-
(bool) did the target change?
Implemented in JMotorControllerClosed, JMotorControllerOpen, and JServoController.
◆ setVelLimit()
|
pure virtual |
set maximum motor speed
- Note
- set to INFINITY to disable limit
- Parameters
-
_velLimit (float)
Implements JMotorControllerBase.
Implemented in JMotorControllerClosed, JMotorControllerOpen, and JServoController.
The documentation for this class was generated from the following file:
- src/JMotorController/JMotorController.h