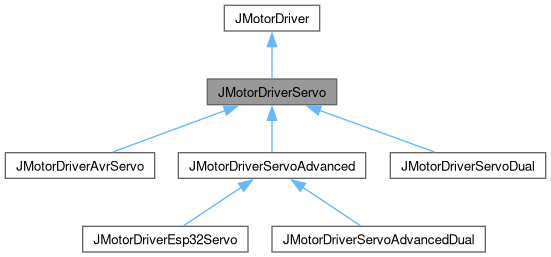
class that can be used to specify a driver that controls specifically a servo
More...
#include <JMotorDriverServo.h>
|
| void | setMinServoValue (int value) |
| | microseconds for shortest servo pulse
|
| |
| void | setMaxServoValue (int value) |
| | microseconds for longest servo pulse
|
| |
| int | getMinServoValue () |
| | returns setting for microseconds for shortest servo pulse
|
| |
| int | getMaxServoValue () |
| | returns setting for microseconds for longest servo pulse
|
| |
| int | getServoValueRange () |
| | returns difference (in microseconds) between longest and shortest servo pulse settings
|
| |
| void | setServoValues (int min, int max) |
| | set the settings for short and long servo pulses at the same time
|
| |
| int | getSetMicroseconds () |
| | returns how many microseconds the servo signal pulse was most recently set to
|
| |
| bool | getConstrainRange () |
| | returns whether the range of set() will be constrained to within -1 and 1
|
| |
| void | setConstrainRange (bool _constrainRange) |
| | set whether the range of set() will be constrained to within -1 and 1
|
| |
| virtual bool | set (float val) |
| | set motor power
|
| |
| virtual bool | setEnable (bool _enable) |
| | use to enable or disable a motor, and sets up pin states
|
| |
| virtual bool | getEnable () |
| | get the enable state of the driver
|
| |
| virtual float | getMaxRange () |
| | high end of the range
|
| |
| virtual float | getMinRange () |
| | low end of the range
|
| |
| bool | enable () |
| | enable motor
|
| |
| bool | disable () |
| | disable motor
|
| |
class that can be used to specify a driver that controls specifically a servo
◆ getConstrainRange()
| bool JMotorDriverServo::getConstrainRange |
( |
| ) |
|
|
inline |
returns whether the range of set() will be constrained to within -1 and 1
- Return values
-
◆ getMaxServoValue()
| int JMotorDriverServo::getMaxServoValue |
( |
| ) |
|
|
inline |
returns setting for microseconds for longest servo pulse
- Return values
-
◆ getMinServoValue()
| int JMotorDriverServo::getMinServoValue |
( |
| ) |
|
|
inline |
returns setting for microseconds for shortest servo pulse
- Return values
-
◆ getServoValueRange()
| int JMotorDriverServo::getServoValueRange |
( |
| ) |
|
|
inline |
returns difference (in microseconds) between longest and shortest servo pulse settings
- Return values
-
◆ getSetMicroseconds()
| int JMotorDriverServo::getSetMicroseconds |
( |
| ) |
|
|
inline |
returns how many microseconds the servo signal pulse was most recently set to
- Return values
-
◆ setConstrainRange()
| void JMotorDriverServo::setConstrainRange |
( |
bool |
_constrainRange | ) |
|
|
inline |
set whether the range of set() will be constrained to within -1 and 1
- Parameters
-
◆ setMaxServoValue()
| void JMotorDriverServo::setMaxServoValue |
( |
int |
value | ) |
|
|
inline |
microseconds for longest servo pulse
- Parameters
-
◆ setMinServoValue()
| void JMotorDriverServo::setMinServoValue |
( |
int |
value | ) |
|
|
inline |
microseconds for shortest servo pulse
- Parameters
-
◆ setServoValues()
| void JMotorDriverServo::setServoValues |
( |
int |
min, |
|
|
int |
max |
|
) |
| |
|
inline |
set the settings for short and long servo pulses at the same time
- Parameters
-
| min | (int) microseconds, often 544 |
| max | (int) microseconds, often 2400 |
◆ constrainRange
| bool JMotorDriverServo::constrainRange |
|
protected |
◆ maxServoValue
| int JMotorDriverServo::maxServoValue |
|
protected |
◆ minServoValue
| int JMotorDriverServo::minServoValue |
|
protected |
◆ setMicroseconds
| int JMotorDriverServo::setMicroseconds = 0 |
|
protected |
how many microseconds the servo signal pulse was most recently set to
The documentation for this class was generated from the following file:
 Public Member Functions inherited from JMotorDriver
Public Member Functions inherited from JMotorDriver