|
| | JServoControllerAdvanced (JMotorDriverServoAdvanced &_servo, float _weakFreq=.5, unsigned long _weakenTimeout=0, float _normalFreq=1.0, unsigned long _startWeakTimeout=0, bool _reverse=false, float velLimit=INFINITY, float accelLimit=INFINITY, float decelLimit=NAN, unsigned long _disableTimeout=0, float _minAngleLimit=0, float _maxAngleLimit=180, float _pos=90, float _minSetAngle=0, float _maxSetAngle=180, int minServoVal=544, int maxServoVal=2400, bool _preventGoingWrongWay=true, bool _preventGoingTooFast=true, float _stoppingDecelLimit=INFINITY) |
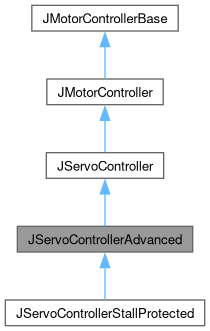
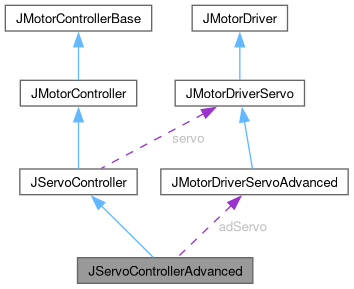
| | Constructor for JServoControllerAdvanced, a class for controlling JMotorDriverServoAdvanced, with angle calibration and accel and velocity limiting.
|
| |
| virtual void | run () |
| | call this in your main loop
|
| |
| bool | setEnable (bool _enable) |
| | enable or disable the servo (start or stop sending a signal to the servo)
|
| |
| void | setStrengthWeak () |
| | set servo to weaker setting
|
| |
| void | setStrengthNormal () |
| | set servo to normal setting
|
| |
| void | adjustServoFrequency (float freq=1.0) |
| | adjust frequency as a fraction of standard 50hz frequency lower frequencies (try .75) may let you reduce how strongly the servo holds its position
|
| |
| void | setWeakFreq (float _weak) |
| | change setting for what fraction of normal frequency the signal should go to in order to weaken the servo's strength
|
| |
| void | setNormalFreq (float _norm) |
| |
| bool | getWeakened () |
| |
| void | setWeakTimeout (unsigned long _timeout) |
| |
| unsigned long | getWeakenTimeout () |
| |
| void | setStartWeakTimeout (unsigned long _timeout) |
| |
| unsigned long | getStartWeakTimeout () |
| |
| float | getWeakFreq () |
| |
| float | getNormalFreq () |
| |
| | JServoController (JMotorDriverServo &_servo, bool _reverse=false, float velLimit=INFINITY, float accelLimit=INFINITY, float decelLimit=NAN, unsigned long _disableTimeout=0, float _minAngleLimit=0, float _maxAngleLimit=180, float _pos=90, float _minSetAngle=0, float _maxSetAngle=180, int minServoVal=544, int maxServoVal=2400, bool _preventGoingWrongWay=true, bool _preventGoingTooFast=true, float _stoppingDecelLimit=INFINITY) |
| | Constructor for JServoController, a class for controlling JMotorDriverServo, with angle calibration and accel and velocity limiting.
|
| |
| void | setAngleImmediate (float angle, bool _run=true) |
| | set servo angle immediately, without velocity or acceleration limiting
|
| |
| void | setAngleImmediateInc (float angleDiff, bool _run=true) |
| | increment servo angle and set immediately, without velocity or acceleration limiting
|
| |
| void | setAngleSmoothed (float angle, bool _run=true) |
| | set servo angle target, servo will move to target but at limited velocity and acceleration
|
| |
| void | setDisableTimeout (unsigned long _timeout) |
| | default: 0, after how many milliseconds of no movement should the servo be disabled? 0=never disable
|
| |
| unsigned long | getDisableTimeout () |
| |
| unsigned long | getLastMovedMillis () |
| | returns the value of millis() when the servo last moved
|
| |
| unsigned long | getMillisSinceMoved () |
| | returns the number of milliseconds since the servo last moved
|
| |
| void | setLastMovedMillis (unsigned long mil) |
| | allows for changing the variable that stores when the servo last moved
|
| |
| bool | enable () |
| | equivalent to setEnable(true)
|
| |
| bool | disable () |
| | equivalent to setEnable(false)
|
| |
| bool | getEnable () |
| | returns whether the servo is enabled or not
|
| |
| float | getPosTarget () |
| | what position is the servo moving towards or at
|
| |
| float | getPos () |
| | what position is the servo actually being set to? (slowly approaches target if smoothing is used)
|
| |
| float | getVelocity () |
| | what rate is servo position being changed at?
|
| |
| bool | isPosAtTarget () |
| | true if position=target, false otherwise
|
| |
| bool | isPosNotAtTarget () |
| | equivalent to !isPosAtTarget()
|
| |
| float | distToTarget () |
| | returns target-position
|
| |
| void | restartRun () |
| | if you stopped calling run() for a while, call this before restarting run() to avoid a big jump in movement
|
| |
| bool | getActive () |
| | returns whether the servo is "awake" (whether signals are being sent)
|
| |
| void | wake () |
| | if the servo has been disabled because of inactivity, calling this function simulates the servo being told to move and wakes it up
|
| |
| void | setReverse (bool rev) |
| |
| bool | getReverse () |
| |
| void | setAngleLimits (float _minAngleLimit, float _maxAngleLimit) |
| |
| void | setMinAngleLimit (float _minAngleLimit) |
| |
| void | setMaxAngleLimit (float _maxAngleLimit) |
| |
| float | getMinAngleLimit () |
| |
| float | getMaxAngleLimit () |
| |
| float | getAngleLimitRange () |
| |
| void | setSetAngles (float _minSetAngle, float _maxSetAngle) |
| |
| void | setMinSetAngle (float _minSetAngle) |
| |
| void | setMaxSetAngle (float _maxSetAngle) |
| |
| float | getAccelLimit () |
| | returns value of accelLimit
|
| |
| float | getDecelLimit () |
| |
| float | getVelLimit () |
| | returns value of velLimit
|
| |
| void | setAccelLimit (float accelLim) |
| | set maximum rate that motor speed can be changed at
|
| |
| void | setAccelAndDecelLimits (float accelLim, float decelLim=NAN) |
| |
| void | setDecelLimit (float decelLim=NAN) |
| |
| void | setVelLimit (float velLim) |
| | set maximum motor speed
|
| |
| void | setVelAccelLimits (float velLim, float accelLim, float decelLim=NAN) |
| |
| void | setPosition (float pos, bool _run=true) |
| | sets servo position, leaves target where it was
|
| |
| void | setMinServoValue (int value) |
| | microseconds for shortest servo pulse
|
| |
| void | setMaxServoValue (int value) |
| | microseconds for longest servo pulse
|
| |
| void | setServoRangeValues (int min, int max) |
| | set the settings for short and long servo pulses at the same time
|
| |
| int | getMinServoRangeValue () |
| | returns setting for microseconds for shortest servo pulse
|
| |
| int | getMaxServoRangeValue () |
| | returns setting for microseconds for longest servo pulse
|
| |
| int | getServoValueRange () |
| | returns difference (in microseconds) between longest and shortest servo pulse settings
|
| |
| int | getSetMicroseconds () |
| | returns how many microseconds the servo signal pulse was most recently set to
|
| |
| bool | getConstrainRange () |
| | returns whether the range of set() will be constrained to within -1 and 1
|
| |
| void | setConstrainRange (bool _constrainRange) |
| | set whether the range of set() will be constrained to within -1 and 1
|
| |
| void | setVel (float vel, bool _run=true) |
| | set velocity for controller
|
| |
| void | setVelTarget (float vel, bool _run=true) |
| | set target velocity for controller (acceleration limited)
|
| |
| float | getVelTarget () |
| | get target velocity for controller
|
| |
| float | getVel () |
| | get current velocity of motor
|
| |
| float | getDriverSetVal () |
| | returns the value the motor driver is being set to
|
| |
| bool | isDriverInRange () |
| | true if motor driver is being set to within its range, false if driver is at a maximum
|
| |
| float | getDriverMinRange () |
| | if getDriverSetVal goes below this, isDriverInRange will go false
|
| |
| float | getDriverMaxRange () |
| | if getDriverSetVal exceeds this, isDriverInRange will go false
|
| |
| float | getMaxVel () |
| | How fast of a motor speed setting would get adjusted to full motor power.
|
| |
| float | getMinVel () |
| | slowest speed motor can go
|
| |
| void | setMaxDriverRangeAmount (float _driverRangeAmount) |
| | set what fraction of driverRange can be used
|
| |
| bool | setPosTarget (float _posTarget, bool _run=true) |
| | set target position (motor drives towards position, following acceleration profile)
|
| |
| bool | setPosSetpoint (float _posSetpoint, bool _run=true) |
| | set position for motor to drive towards position as fast as possible (setpoint for control loop if available)
|
| |
| bool | setPosDelta (float _posDelta, bool _run=true, bool _resetPos=false) |
| | alternative method for setting velocity that uses setPosSetpoint
|
| |
| float | getPosSetpoint () |
| | get position controller is currently trying to get to
|
| |
| float | resetPos () |
| | reset what position the controller thinks it's in
|
| |
| bool | isPosModeNotVelocity () |
| | true if controller is in position target mode, false if in velocity mode
|
| |
class for controlling JMotorDriverServoAdvanced, with power reducing option along with standard JServoController features
- Note
- this servo controller supports adjusting the servo signal frequency which for many servos can change how hard the servos push
 Public Member Functions inherited from JServoController
Public Member Functions inherited from JServoController