defines interface for servo driver with variable frequency, subclass of JMotorDriverServo and JMotorDriver More...
#include <JMotorDriverServoAdvanced.h>
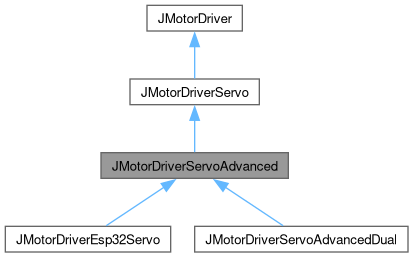
Inheritance diagram for JMotorDriverServoAdvanced:
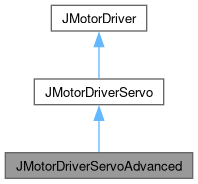
Collaboration diagram for JMotorDriverServoAdvanced:
Public Member Functions | |
| virtual void | adjustFrequency (float freq)=0 |
| adjust frequency as a fraction of standard 50hz frequency lower frequencies (try .75) may let you reduce how strongly the servo holds its position | |
 Public Member Functions inherited from JMotorDriverServo Public Member Functions inherited from JMotorDriverServo | |
| void | setMinServoValue (int value) |
| microseconds for shortest servo pulse | |
| void | setMaxServoValue (int value) |
| microseconds for longest servo pulse | |
| int | getMinServoValue () |
| returns setting for microseconds for shortest servo pulse | |
| int | getMaxServoValue () |
| returns setting for microseconds for longest servo pulse | |
| int | getServoValueRange () |
| returns difference (in microseconds) between longest and shortest servo pulse settings | |
| void | setServoValues (int min, int max) |
| set the settings for short and long servo pulses at the same time | |
| int | getSetMicroseconds () |
| returns how many microseconds the servo signal pulse was most recently set to | |
| bool | getConstrainRange () |
| returns whether the range of set() will be constrained to within -1 and 1 | |
| void | setConstrainRange (bool _constrainRange) |
| set whether the range of set() will be constrained to within -1 and 1 | |
| Public Member Functions inherited from JMotorDriver | |
| virtual bool | set (float val) |
| set motor power | |
| virtual bool | setEnable (bool _enable) |
| use to enable or disable a motor, and sets up pin states | |
| virtual bool | getEnable () |
| get the enable state of the driver | |
| virtual float | getMaxRange () |
| high end of the range | |
| virtual float | getMinRange () |
| low end of the range | |
| bool | enable () |
| enable motor | |
| bool | disable () |
| disable motor | |
Additional Inherited Members | |
| Protected Attributes inherited from JMotorDriverServo | |
| int | minServoValue |
| int | maxServoValue |
| int | setMicroseconds = 0 |
| bool | constrainRange |
Detailed Description
defines interface for servo driver with variable frequency, subclass of JMotorDriverServo and JMotorDriver
Member Function Documentation
◆ adjustFrequency()
|
pure virtual |
adjust frequency as a fraction of standard 50hz frequency lower frequencies (try .75) may let you reduce how strongly the servo holds its position
- Note
- different servos may respond differently, possibly including being damaged, so use at your own risk!
- Parameters
-
freq (float) freq*50=setFrequency
Implemented in JMotorDriverServoAdvancedDual, and JMotorDriverEsp32Servo.
The documentation for this class was generated from the following file:
- src/JMotorDriver/JMotorDriverServoAdvanced.h