#include <JSwerveModuleDifferential.h>
◆ JSwerveModuleDifferential()
- Parameters
-
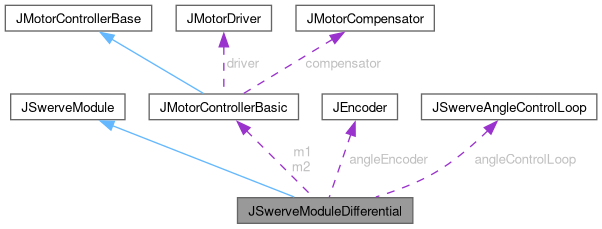
| _m1 | positive speed drives forward and steers CCW if viewed from above, just swap which motor is m1 and m2 or reverse a motor if this is not the case |
| _m2 | positive speed drives forward and steers CW if viewed from above, just swap which motor is m1 and m2 or reverse a motor if this is not the case |
| _angleEncoder | JEncoder, should be absolute encoder, from 0-360 degrees for a revolution |
| _angleControlLoop | JSwerveAngleControlLoop object |
| _driveRatio | motor revolutions per drive distance unit |
| _steeringRatio | motor revolutions per steering revolution |
| _angleOffset | degrees, default=0 added to encoder reading, adjust until angle is zero when wheel is straight forwards |
◆ getAngle()
| float JSwerveModuleDifferential::getAngle |
( |
| ) |
|
|
inlinevirtual |
get angle measurement from wheel
- Return values
-
Reimplemented from JSwerveModule.
◆ getEnable()
| bool JSwerveModuleDifferential::getEnable |
( |
| ) |
|
|
inlinevirtual |
get enable state of module
- Return values
-
| (bool) | true = motors enabled, false = motors disabled |
Reimplemented from JSwerveModule.
◆ getMaxSpeed()
| float JSwerveModuleDifferential::getMaxSpeed |
( |
| ) |
|
|
inlinevirtual |
◆ run()
| void JSwerveModuleDifferential::run |
( |
| ) |
|
|
inlinevirtual |
call this in loop() so that the swerve module can update its motors and angle control loop
Reimplemented from JSwerveModule.
◆ set()
| void JSwerveModuleDifferential::set |
( |
float |
_speed, |
|
|
float |
_angle, |
|
|
bool |
_run = true |
|
) |
| |
|
inlinevirtual |
set speed and angle setpoints for wheel
- Parameters
-
| speed | (float) speed for wheel |
| angle | (float) angle in degrees |
| run | (bool) default:true, true = call run() in this function, false = you'll call run() yourself |
- Return values
-
Reimplemented from JSwerveModule.
◆ setEnable()
| bool JSwerveModuleDifferential::setEnable |
( |
bool |
_enable | ) |
|
|
inlinevirtual |
set enable state of swerve module motors
- Parameters
-
| _enable | (bool) true = enable module, false = disable module |
- Return values
-
| (bool) | true if state changed, false if state already set |
Reimplemented from JSwerveModule.
◆ zeroTurnCounter()
| long JSwerveModuleDifferential::zeroTurnCounter |
( |
| ) |
|
|
inlinevirtual |
zeros the encoder's counter of full turns, leaving only the fractional turn
- Return values
-
| (long) | previous turn counter value |
Reimplemented from JSwerveModule.
◆ angleControlLoop
◆ angleEncoder
| JEncoder& JSwerveModuleDifferential::angleEncoder |
◆ angleOffset
| float JSwerveModuleDifferential::angleOffset = 0 |
◆ angleSetpoint
| float JSwerveModuleDifferential::angleSetpoint = 0 |
◆ driveRatio
| float JSwerveModuleDifferential::driveRatio = 1 |
◆ m1
◆ m2
◆ speedSetpoint
| float JSwerveModuleDifferential::speedSetpoint = 0 |
◆ steeringRatio
| float JSwerveModuleDifferential::steeringRatio = 1 |
The documentation for this class was generated from the following file:
 Public Member Functions inherited from JSwerveModule
Public Member Functions inherited from JSwerveModule